Часть — 1. Начало
Все началось на 4-ом курсе, когда в качестве задания на курсовую я начал писать код для робота, который бы ездил по линии. В понимании того, как это должно работать мне помогла статья "Desktop Line Following Robot" товарища ChaN'а. Мозгом был выбран микроконтроллер ATmega16. Код должен был писаться на ассемблере (предмет то назывался "Языки низкого уровня")
Для начала я внимательно просмотрел код из вышеуказанной статьи. Некоторые идеи я взял оттуда. Впоследствии в процессе разработки и отладки часть кода была только отлажена, а часть претерпела значительные изменения. Но для начала я расскажу о том, как я придумывал самого робота — шасси и крепление всех элементов. Именно придумывал, поскольку поиск оптимальной конструкции длился до середины 5-ого курса :)
Началось все с ролика в одной из тем на Roboforum'е, где было предложено использовать колеса от роликовых коньков.
Сама платформа была вырезана из из оргстекла толщиной 3мм. В качестве колес применены колеса от роликовых коньков с диаметром 8см. Конструкция приводилась в движение при помощи двух электродвигателей с редукторами, выполненными на основе деталей от CD-приводов. Переднее поворотное колесо мебельное. Тестировал просто подавая питание на двигатели, двигалось шустро и при этом издает характерный звук от шестеренок (сказывались большие обороты двигателей). Фотографии привожу ниже (фотографии кликабельны).
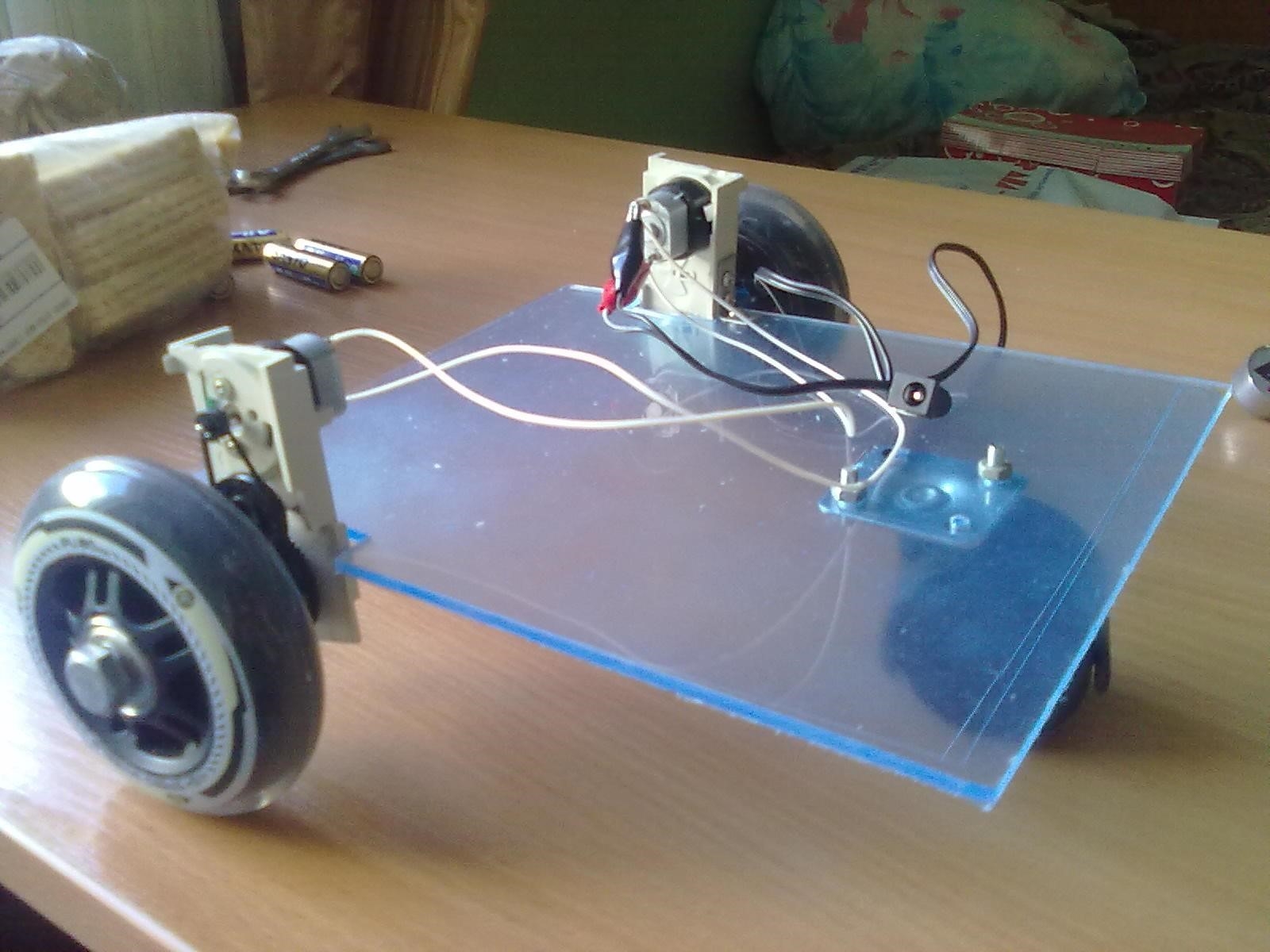
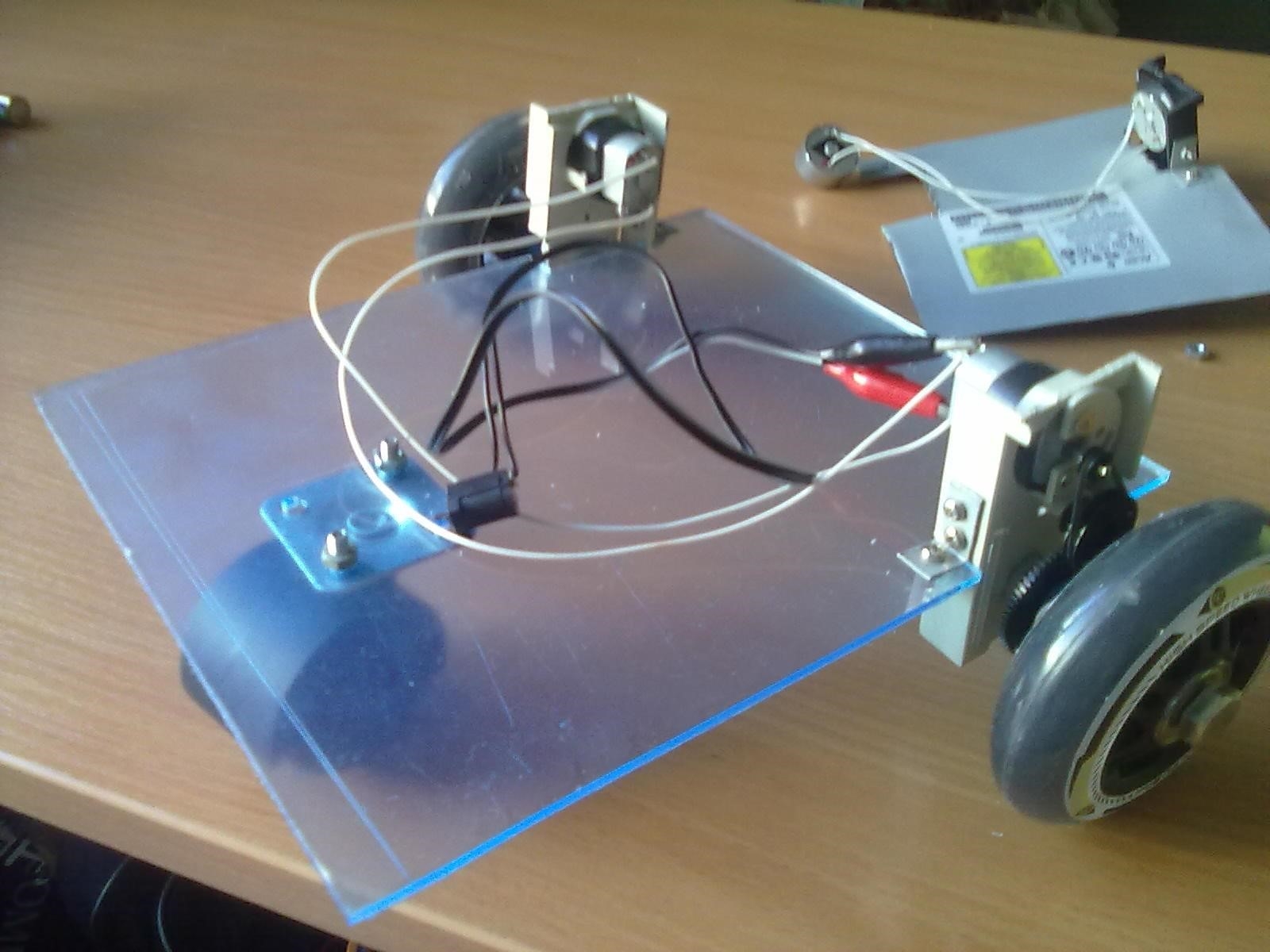

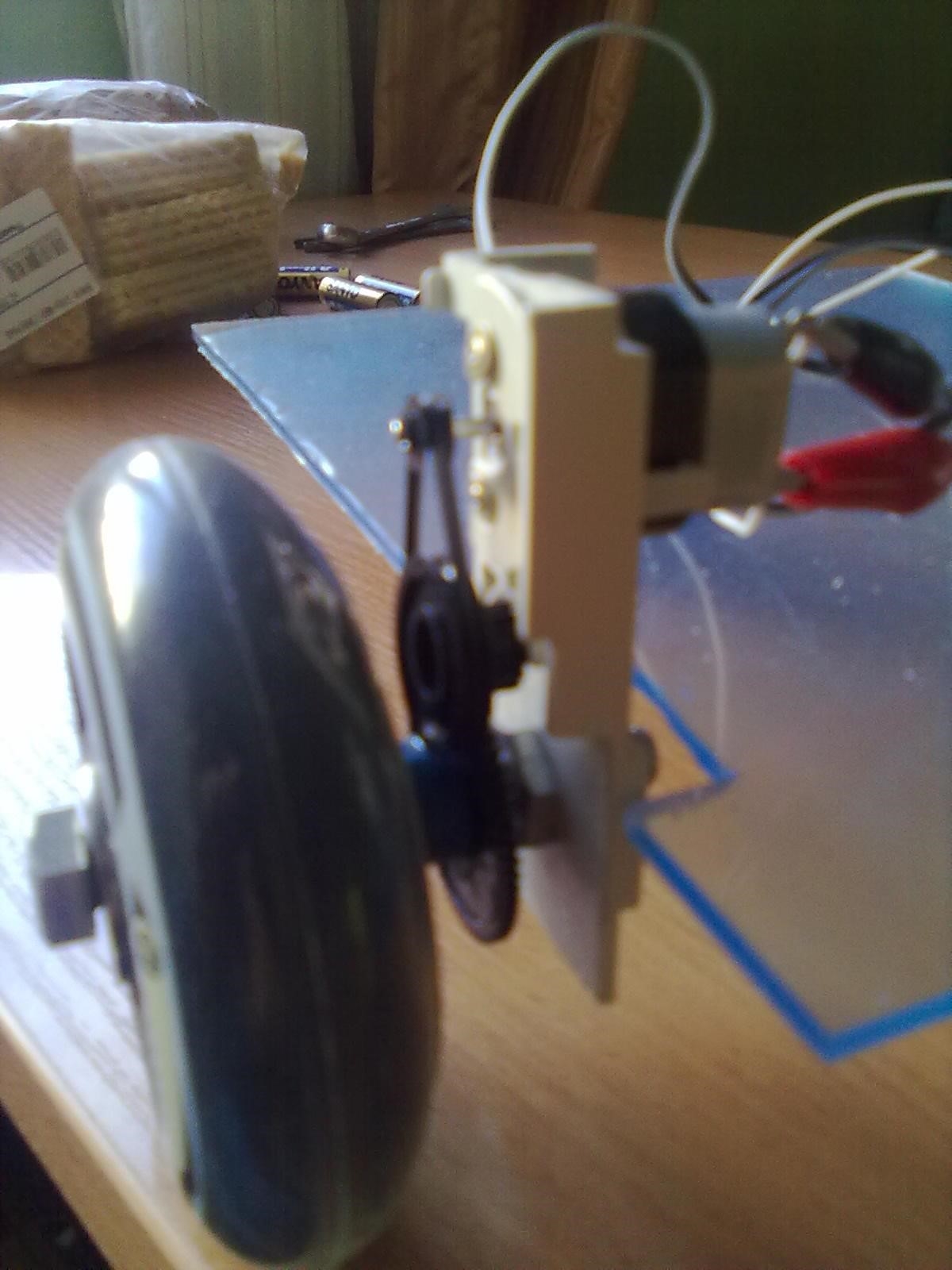
Видеозаписи работы данной платформы к сожалению не делал. Отмечу лишь, что ездила она шустро, но через несколько запусков нужно было поправлять балансировку колес, на фотографии вверху слева как раз видно искривление, вызванное движением шестеренок вертикально относительно друг друга.
Для приведения всей этой конструкции в движение я использовал два электродвигателя QX-FF-130-11340 фирмы QX Motors. Характеристики и фото приведены ниже.

- Диапазон питающего напряжения — 3-12 В
- Номинальное напряжение — 9 В
- Номинальная частота вращения — 5900 об/мин
- Номинальный ток — 0.15 А
- Номинальный момент — 12 гс*см
- Номинальный мощность на валу — 0.73 Вт
- Диаметр — 21 мм
- Длина с валом — 39 мм
Конструкция оказалась сложной в плане балансировки колес и обеспечения достаточной жесткости. А самое главное что возникли бы большие проблемы при управлении. Переднее колесо поворачивается вокруг своей оси и это могло приводить к его непроизвольным поворотам (это явление называется шимми). Поэтому я приступил к разработке нового шасси.
Часть — 2. Редуктор Tamiya
После первой пробы, я начал просматривать различные товары на тему любительской робототехники. особенно меня интересовали редукторы. Подключение двигателей напрямую к колесам является плохой идеей вследствие малого вращательного момента на двигателе и малой его нагрузочной способности. И в один из дней наткнулся на редуктор известной фирмы Tamiya. Это был Tamiya 70168 Double Gearbox Kit. Набор позволяет собрать 4 различных варианта сдвоенных редукторов с разными передаточными числами: 12.7:1, 38:1, 115:1, и 344:1. Также он содержит два небольших электродвигателя постоянного тока, которые вращают независимые 3-миллиметровые шестиугольные оси (старые мои двигатели не совсем подошли по габаритам). Цена составила около 500р и я решил что лучше купить, чем снова лепить свое из мусора. Также была куплена шаровая опора Pololu 1/2" c железным шаром и свинцово-кислотный аккумулятор (SLA) DJW6-4.5 на 6V и 4.5Ah фирмы LEOCH (выбирал исходя из цены и простоты зарядки, литий-полимерные аккумуляторы показались дорогими). Размеры аккумулятора 100х47х70 мм, вес 0,81 кг.


После того, как все пришло, я приступил к постройке нового шасси. Размеры платформы были уменьшены до 220х120 мм. В задней части по бокам сделаны два выреза для колес, размером 60х25 мм. Основой также, как и в первом варианте, является оргстекло толщиной 3мм. Колеса взяты от старой китайской радиоуправляемой машинки, диаметр около 55 мм. Следует отметить, что в ходе испытаний было отмечено их малое сцепление с поверхностью (тестировал на столе и полу), поэтому на колеса натянуты отрезки резины от велосипедной камеры (видно на фотографиях). Это позволило немного увеличить сцепление и улучшило эстетический вид самой конструкции.
В роли переднего колеса установлена шаровая опора. Я использовал Pololu 1/2" Ball Caster c железным шаром. Эта шаровая опора использует железный шар диаметром 12,7 мм. Высота собранного комплекта колеблется от 13,5 мм до 20,3 мм. Пластиковые катки используются чтобы минимизировать трение между шаром и основанием.
Затем был проведен первый тест.
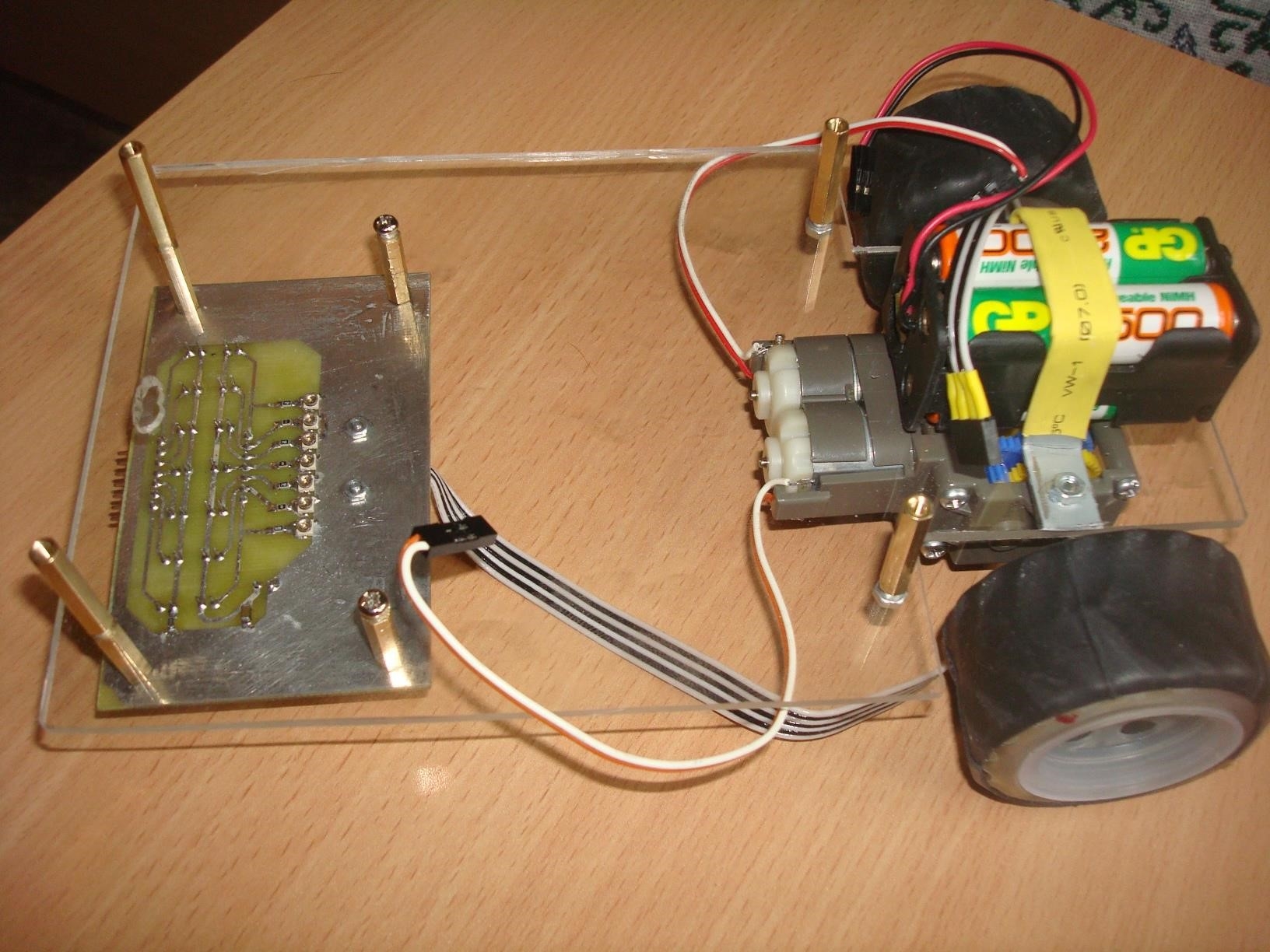
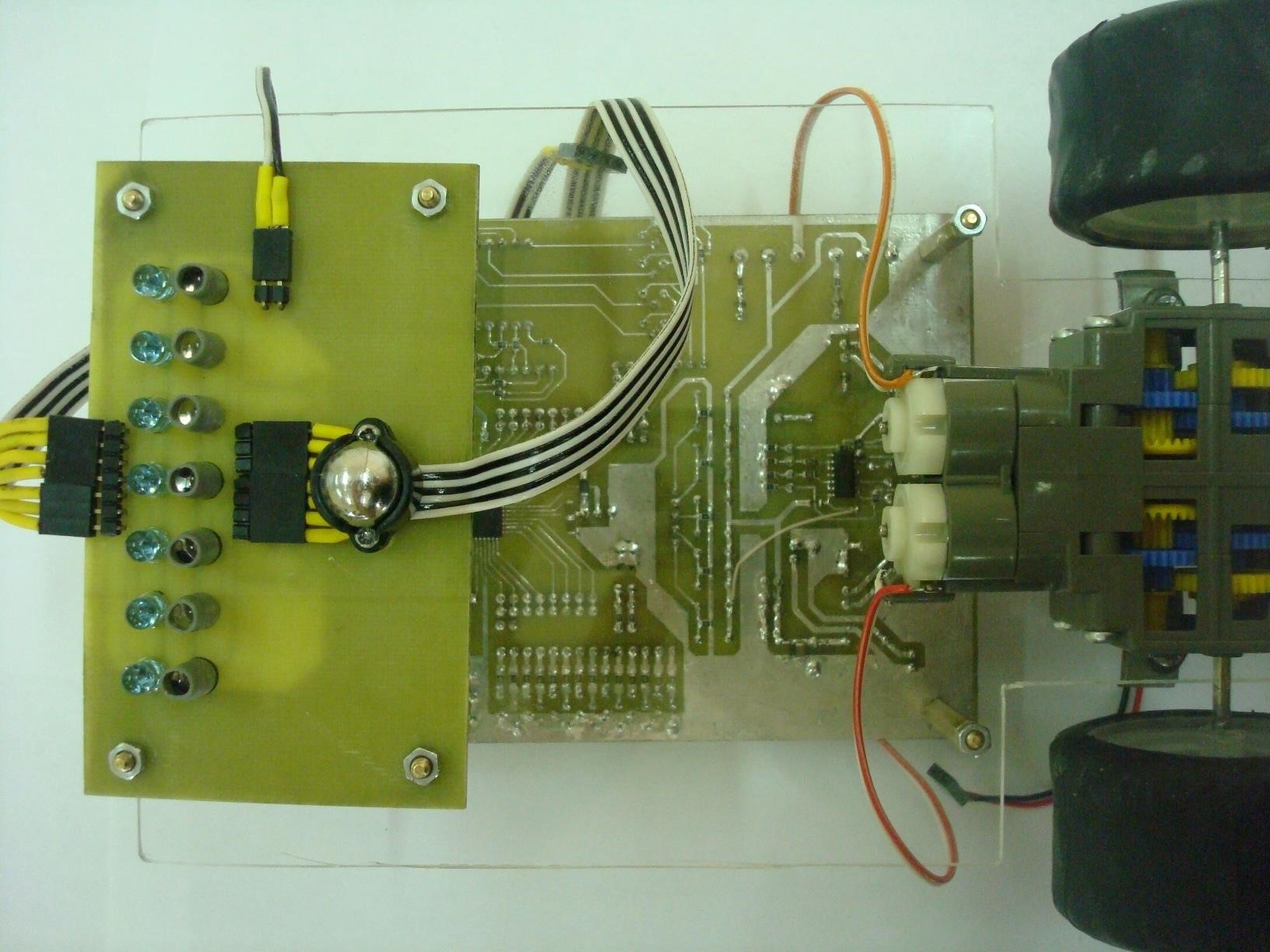
Ниже привожу фотографии новой конструкции с установленными платами и аккумулятором (фотографии кликабельны)
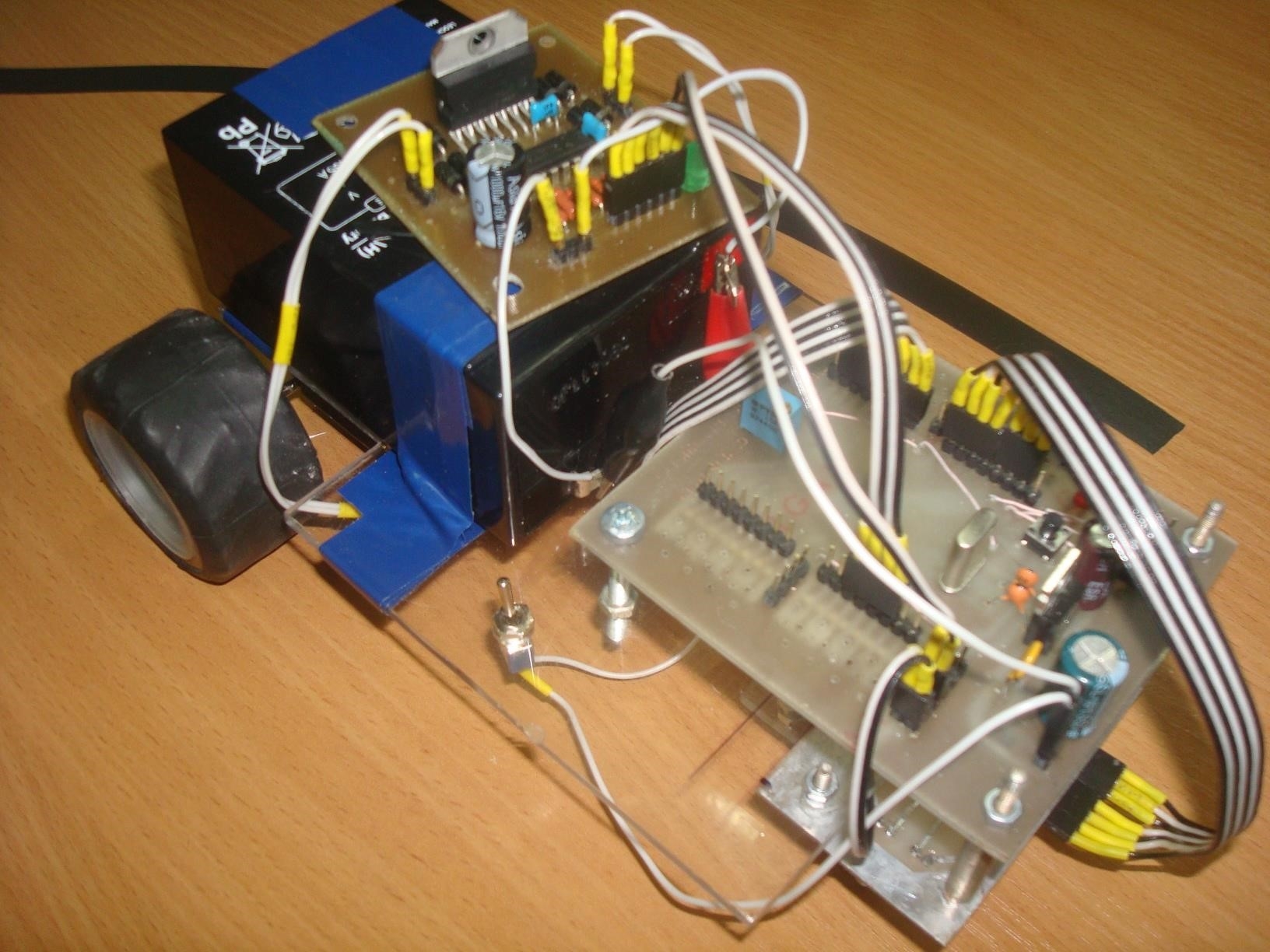
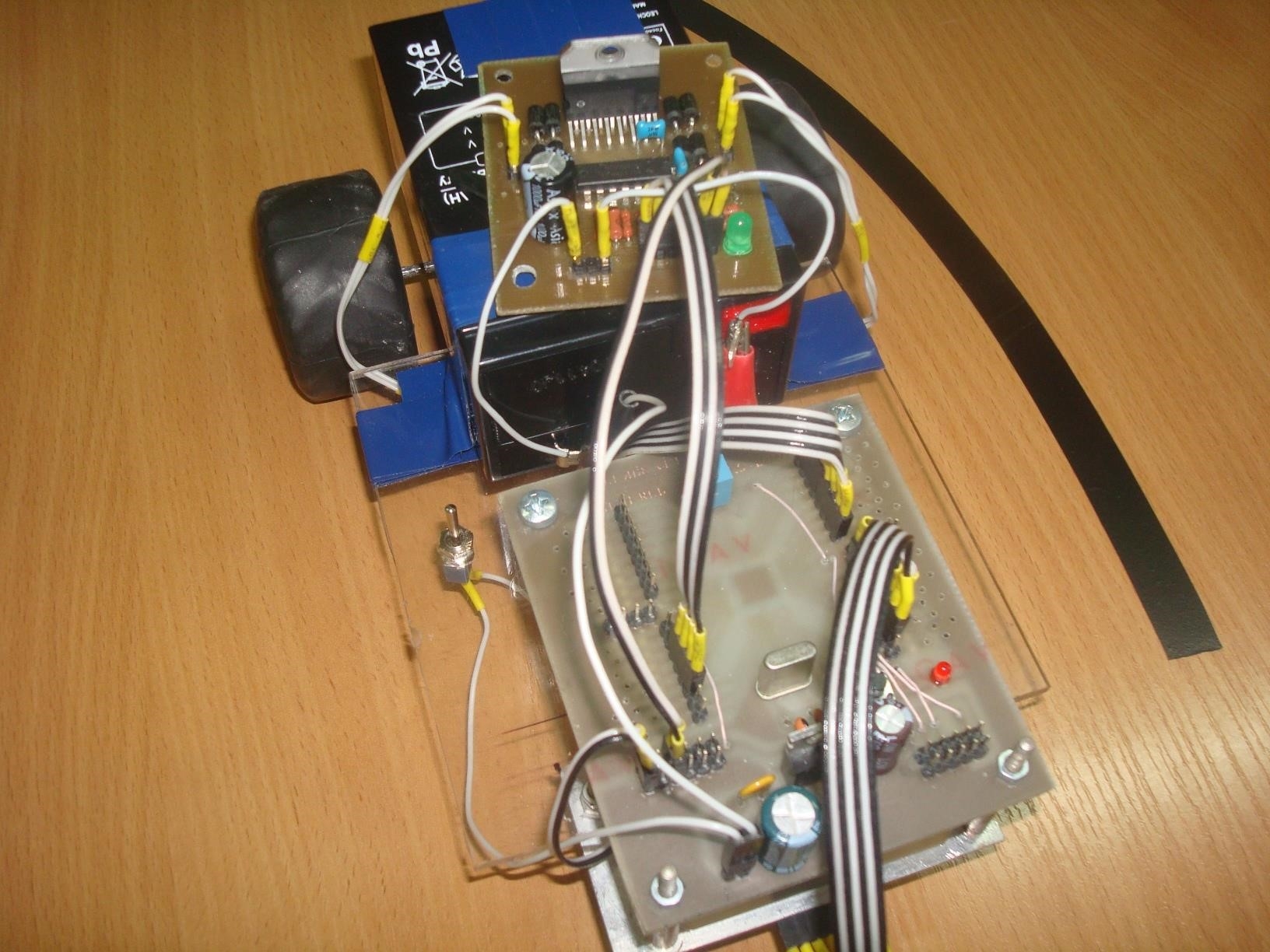
Робот включал в себя три платы: управляющая плата с ATmega16, плата управления двигателями на L298N и датчик линии на светодиодах и фототранзисторах. Кстати это был первый запаянный микроконтроллер в корпусе TQFP :) Позже платформа была переработана. Платы объединены с целью удобства. Об электронике и программе я напишу в конце статьи. А пока пример тестовой рулежки с простейшим релейным алгоритмом. Малая скорость обусловлена не весом аккумулятора, а ограничением в коде программы.
Часть — 3. Итог
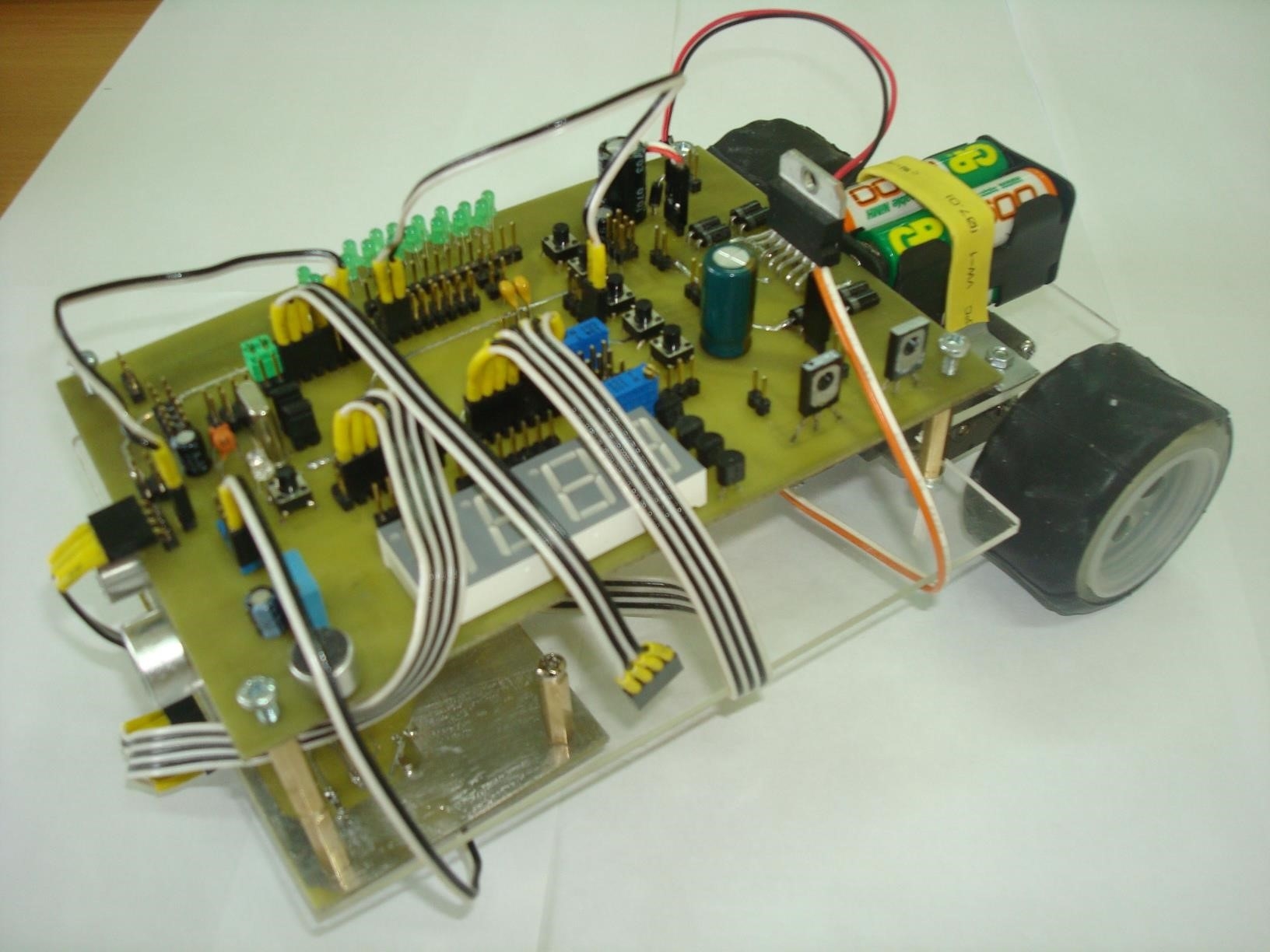
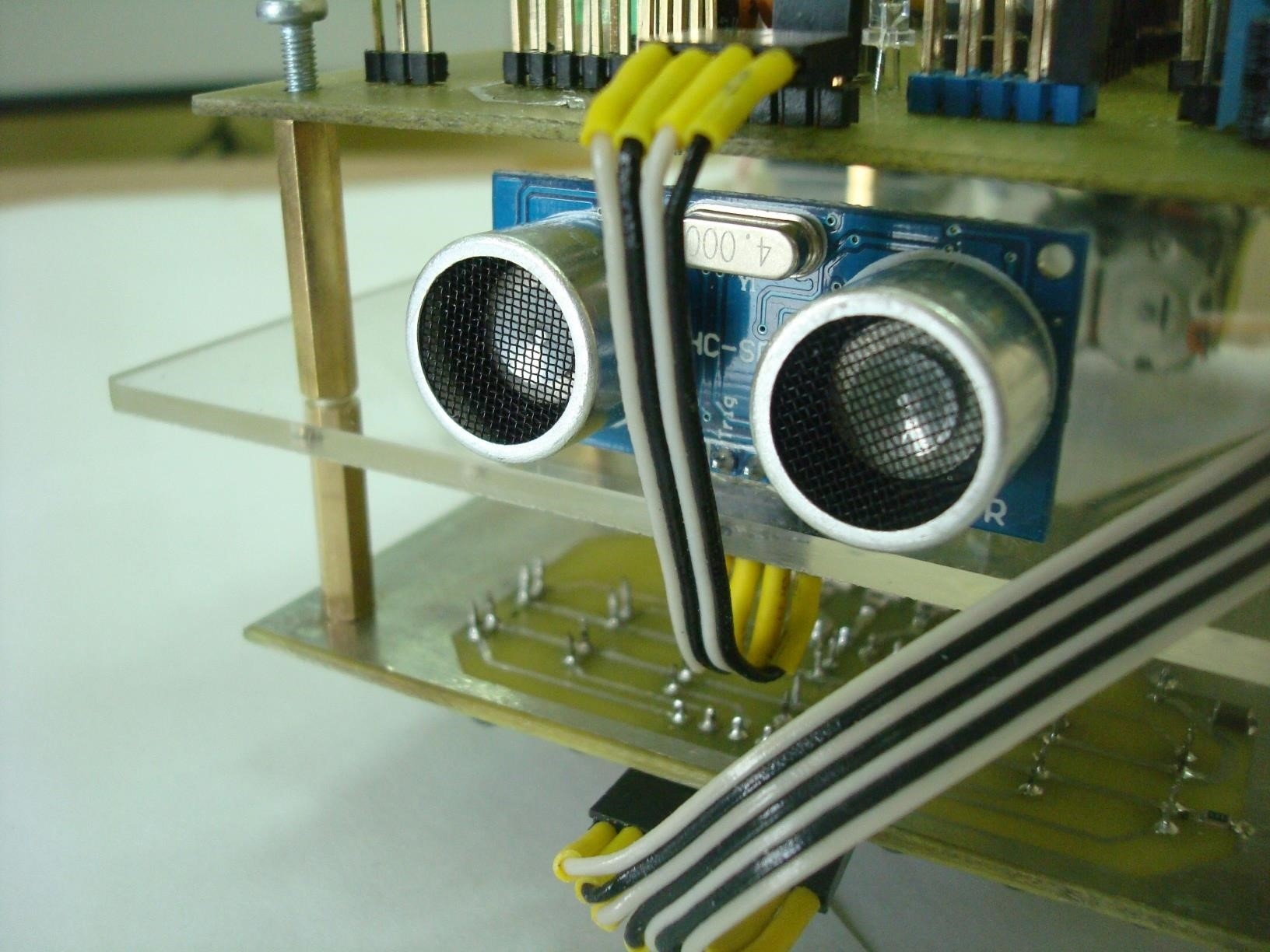
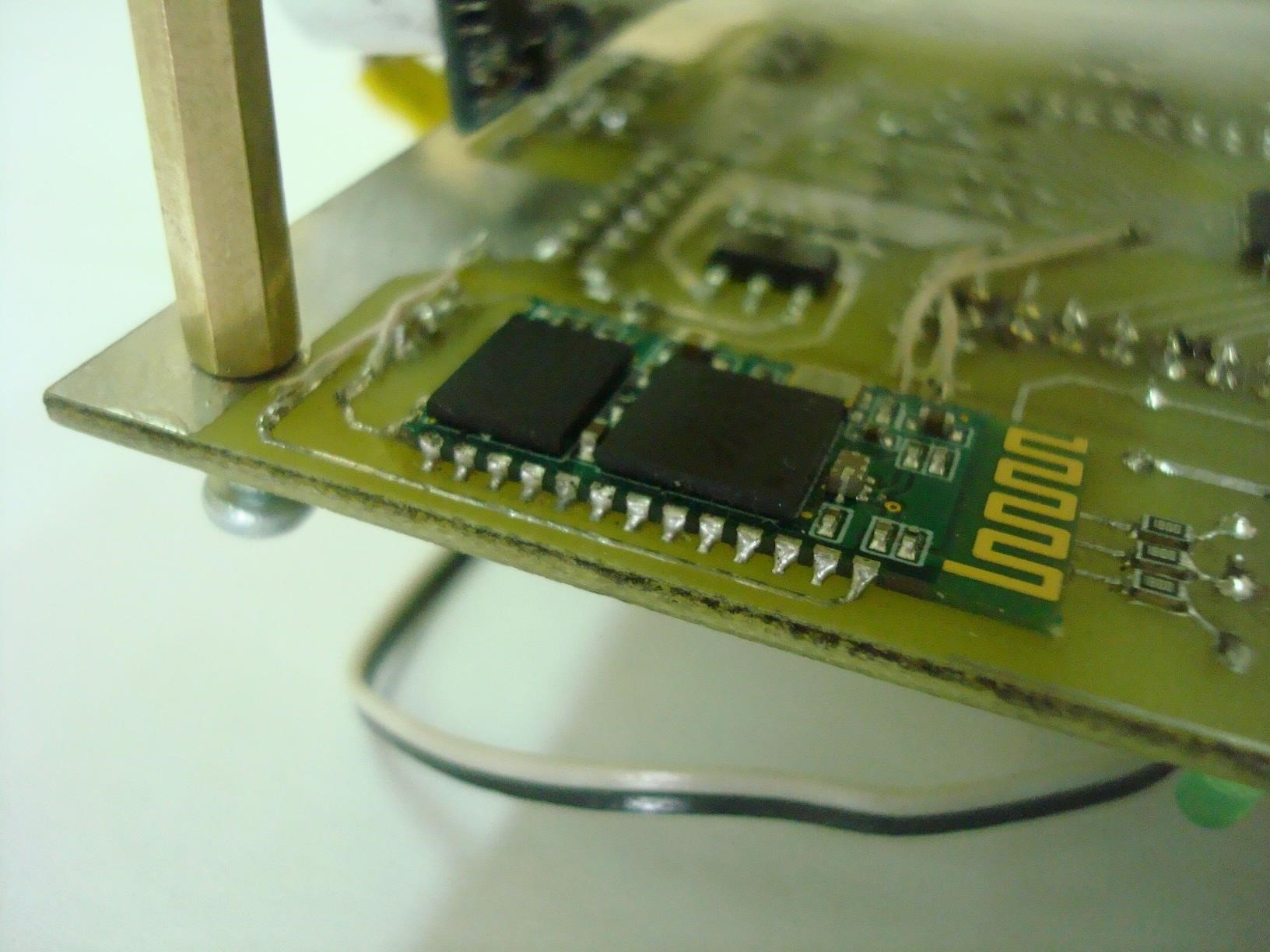
Третий вариант шасси не сильно отличается от второго. Платформа была по-новому выпилена из того же оргстекла, но уже аккуратнее. Аккумулятор я заменил на 4 Ni-Mh аккумулятора GP по 2500 mAh. Переделал плату датчика линии и объединил драйвер двигателей с управляющим контроллером. Также к тому времени пришел ультразвуковой дальномер HC-SR04, который я закрепил спереди. Вдобавок я решил прикрутить Bluetooth-модуль HC-05 для управления и удаленного опроса датчиков.



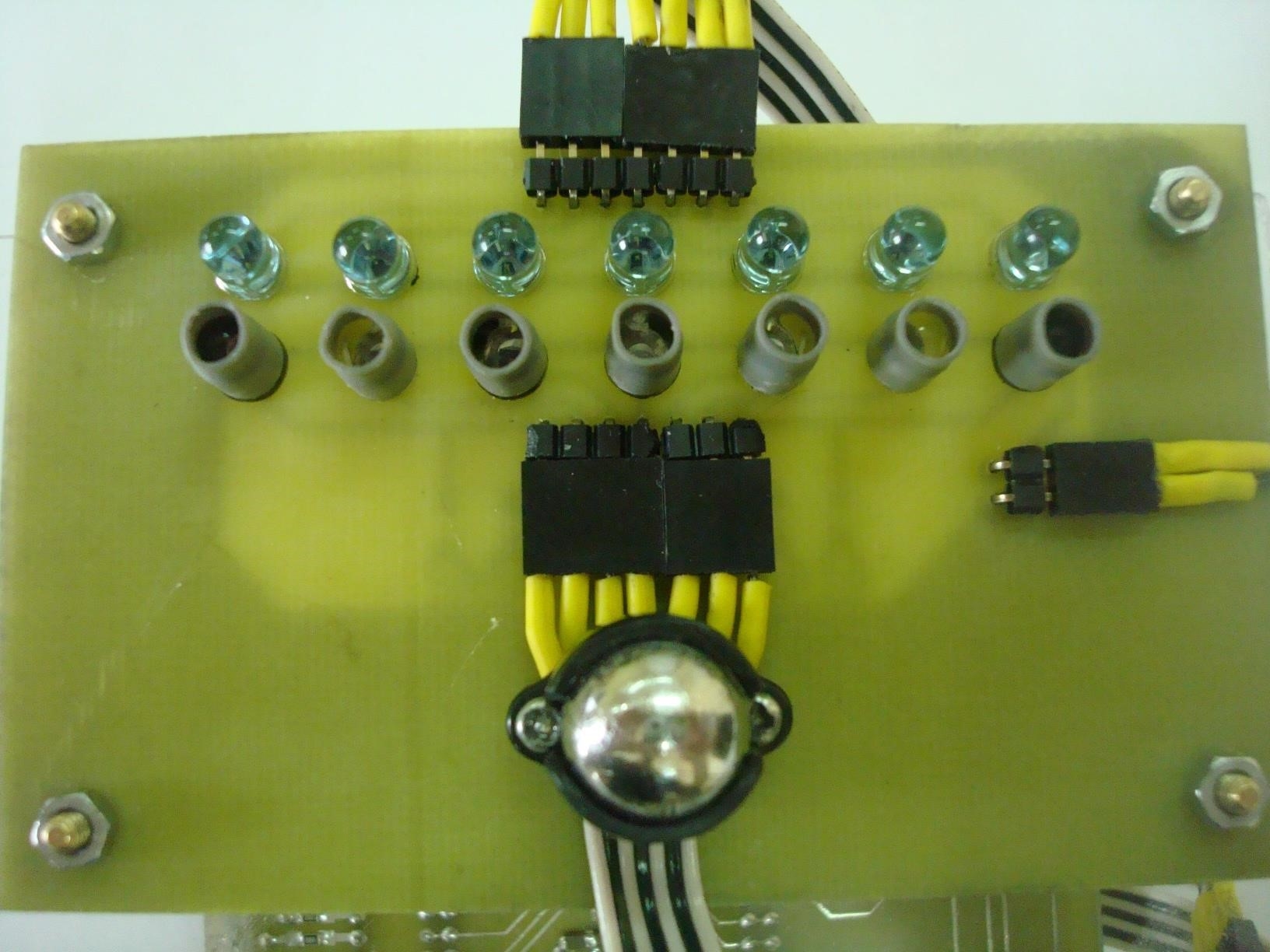
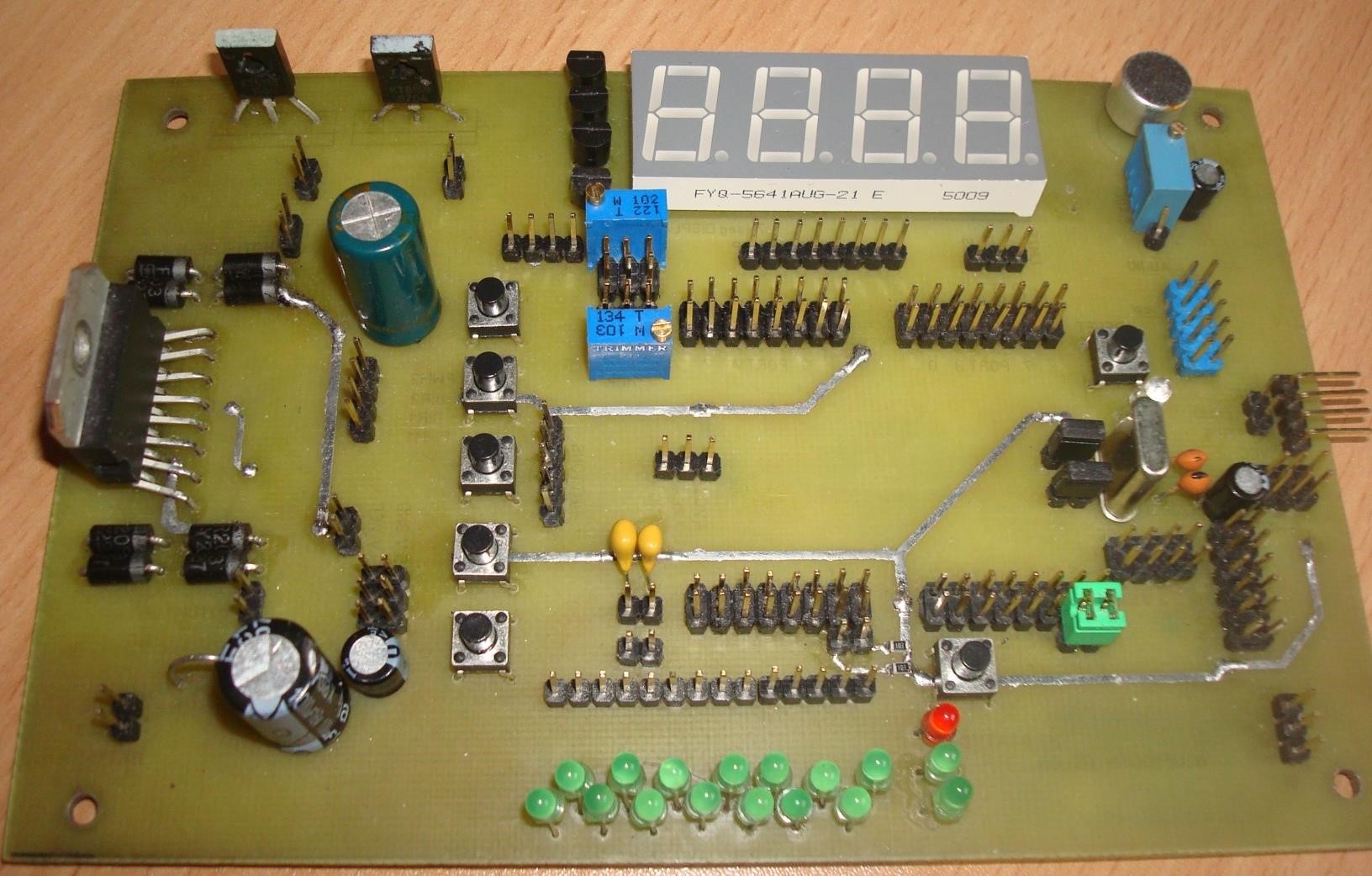
Возможно это и было наивно, но планировалось что плата робота в то же время будет и некой отладочной платой для различных идей. Поэтому к ней было добавлено большое количество дополнительных элементов: светодиоды, кнопки, переменные резисторы, микрофон с усилителем на LM358, 4-разрядный 7-сегментный индикатор, пара штырей для 1-wire c предварительной подтяжкой пина DQ к VCC через 4,7кОм, два биполярных n-p-n транзистора, две интегрирующих цепочки для ШИМ и отдельные линии питания 5 В и 3,3 В. Фото платы и всей конструкции робота ниже (кликабельны).
В следующей части будут описаны схемы робота, а также рассмотрен режим отладки.
Другой вариант, возможно проблема с подгрузкой фотографий, можете глянуть здесь Как я собирал первого своего робота, что-то в дополнение к этой статье найдётся